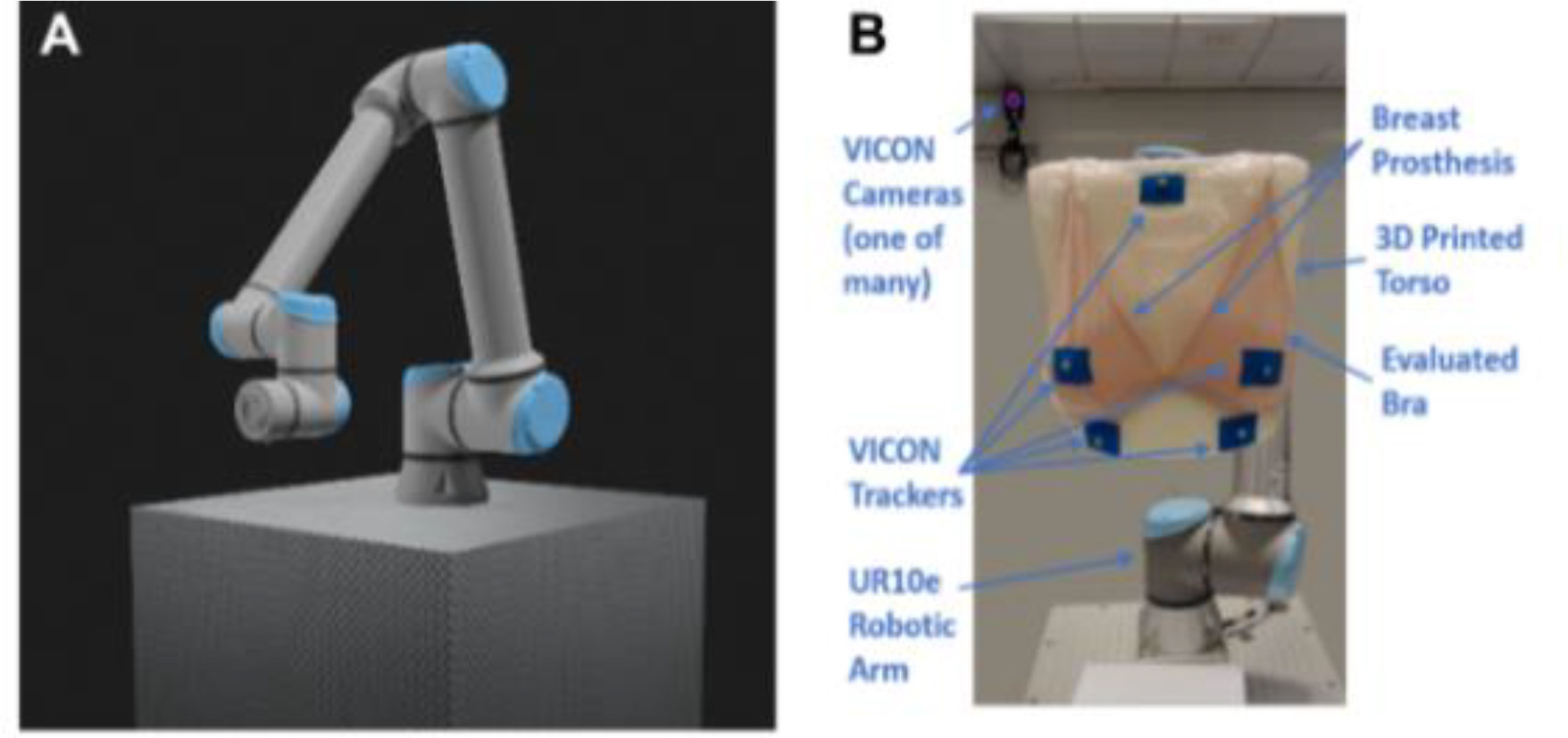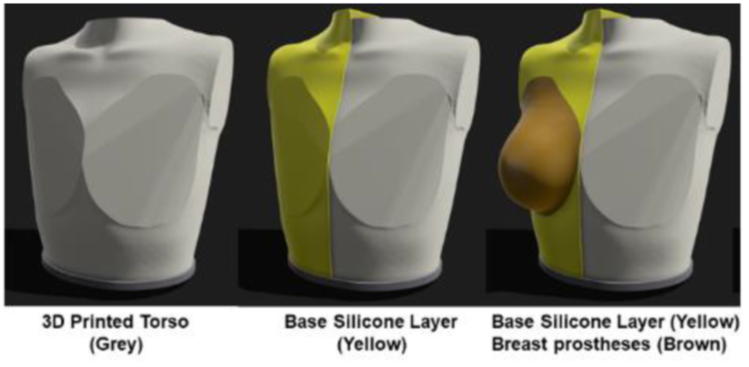
Traditional studies evaluating breast motion and bra performance have involved human subjects, but maintaining consistent results is challenging due to biomechanical limitations. Therefore, this study proposes an objective and reliable method to ensure consistent testing conditions for evaluating breast motion. This method involves designing a manikin with soft breast prostheses and incorporating with a commercial 6-degree-of-freedom robotic arm. Soft silicone rubber was used for fabrication of artificial breasts. Moreover, the robotic arm can replicate the movement of torso, and the soft breast prostheses can mimic that of female breast. The results show the breast prostheses of manikin close to the human breast in dynamic performance that was validated by the motion capture experiment. This new approach can be used for evaluating the sports bra to compare their supporting level.